

















- Đây là phương pháp phổ thông và hiện tại đang được sử dụng rất rộng dãi trong đa số các máy móc.
- Phương pháp này thường chỉ thích hợp với việc điều khiển độc lập các servo với số lượng ít và quá trình điều khiển không cần nội suy tuyến tính hoặc chỉ nội suy 2-3 trục.
* Một số dòng PLC phổ biến đang được sử dụng điều khiển servo dạng phát xung bao gồm:
1.1. PLC hãng Delta.
- DVP14SS211T
- DVP12SA211T
- DVP28SV211T
1.2. PLC hãng Mitsubishi.
- FX3U
- FX5U
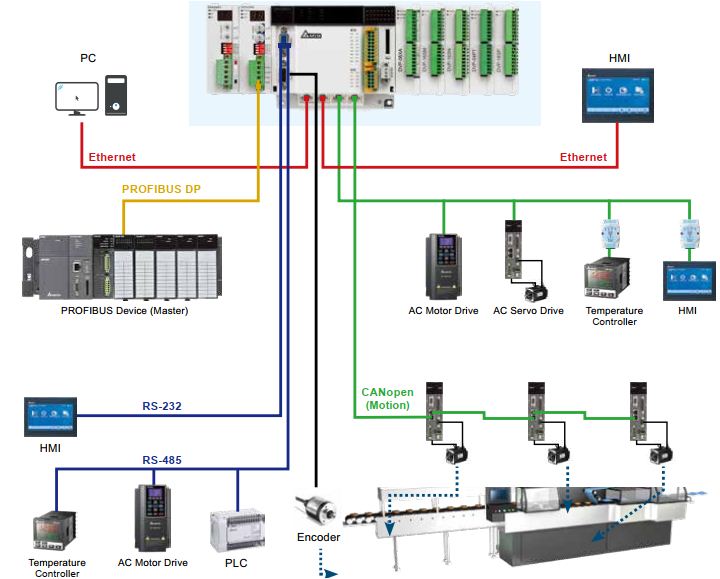
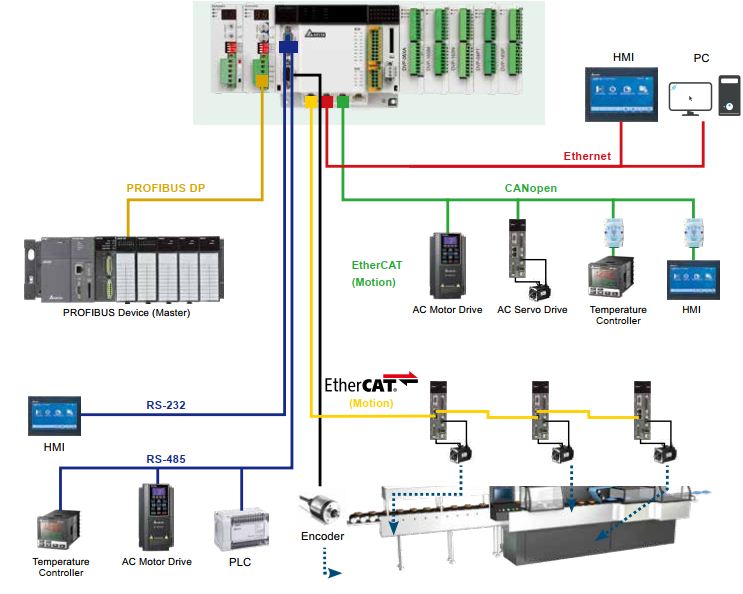
2. Phương pháp điều khiển qua mạng truyền thông.
- Đây là phương pháp điều khiển mới và được áp dụng trong các máy móc cần điều khiển số lượng servo nhiều.
- Áp dụng cho các máy móc điều khiển phức tạp, cần quá trình nội suy tuyến tính nhiều servo cùng lúc.
- Phương pháp này giúp điều khiển linh hoạt, với độ chính xác cao cho các máy móc yêu cầu cao về tốc độ và chất lượng sản phẩm.
* Một số dòng PLC phổ biến đang được sử dụng điều khiển servo qua mạng truyền thông:
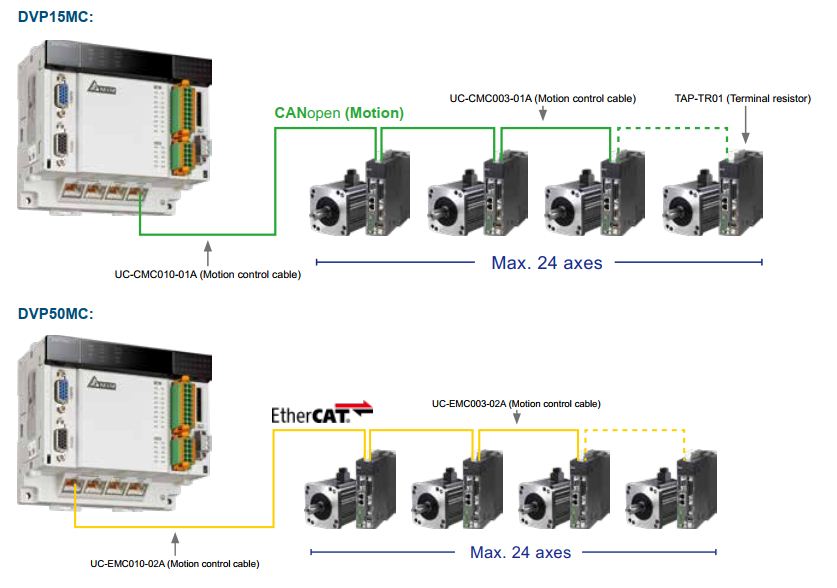
2.1. PLC hãng Delta.
- DVP15MC11T: Điều khiển servo qua mạng CANopen (Motion), có thể điều khiển tối đa lên tới 24 servo cùng lúc.
Thông tin liên hệ để được hỗ trợ tư vấn
Kỹ sư: NGUYỄN VĂN MINH - HP: 0384 577 377 (Zalo)