

















Sửa chữa servo YASKAWA - Sửa chữa servo
Công ty DKN là đơn vị chuyên nhận SỬA CHỮA - KHẮC PHỤC LỖI các dòng servo hãng Yaskawa như: Sigma II, Sigma III (SGDS), Sigma V (SGDV, SGMJV, SGMAV ...), Sigma VII (SGD7S, SGM7A, SGM7J, SGM7P, SGM7G...). Đảm bảo dịch vụ sửa chữa nhanh nhất, giá thành tốt nhất và chế độ bảo hành uy tín nhất.LIÊN HỆ: 0384 577 377 (Phone/Zalo)
1. Các lỗi servo Yaskawa chúng tôi tiếp nhận sửa chữa
♦ Lỗi phần Motor servo:
- Hư Encoder (Driver khi cấp nguồn báo lỗi A.C90)
- Lỗi Encoder chập chờn (Động cơ có thể vẫn hoạt động nhưng khi chạy có hiện tượng giật cục không được êm, trong quá trình chạy thường xuyên báo lỗi)
- Động cơ bị mất gốc (Động cơ khi chạy giật mạnh rồi báo lỗi quá tải hoặc quá tốc độ)
- Động cơ mòn cơ khí đầu trục, vỡ ổ bi, mòn bạc đạn (Động cơ khi chạy có tiếng kêu to khó chịu, chạy nhanh bị nóng)
- Động cơ bị hư phanh (Động cơ khi cấp nguồn phanh không thấy cuộn phanh hút hoặc có hút nhưng phanh không mở nếu cố chạy driver sẽ báo lỗi quá tải)
- Động cơ bị rà phanh (Động cơ vẫn hoạt động nhưng liên tục báo lỗi quá tải hoặc quá nhiệt, nhiệt độ động cơ nóng bất thường)
♦ Lỗi phần Driver servo:
- Lỗi mất nguồn (Do cháy nổ, hư main công suất PB, main điều khiển CB)
- Lỗi một gạch (Lỗi này có thể xử lý nhanh và lấy ngay trong ngày)
- Các lỗi cháy nổ (Do cấp nhầm nguồn, do chạy quá tải, do chạm chập, ngập nước, do sét đánh hoặc do các nguyên nhân khác...)
- Lỗi mạch điều khiển, EPROM, bộ vi xử lý, bộ so sánh
- Lỗi mạch công suất, cháy nổ IGBT, mạch kích xung điều khiển
- Các lỗi báo trên màn hình điều khiển (Màn hình hiển thị lỗi A.030; A.100; A.300; A.320; A.400; A.410; A.C90... )
- Hư Encoder (Driver khi cấp nguồn báo lỗi A.C90)
- Lỗi Encoder chập chờn (Động cơ có thể vẫn hoạt động nhưng khi chạy có hiện tượng giật cục không được êm, trong quá trình chạy thường xuyên báo lỗi)
- Động cơ bị mất gốc (Động cơ khi chạy giật mạnh rồi báo lỗi quá tải hoặc quá tốc độ)
- Động cơ mòn cơ khí đầu trục, vỡ ổ bi, mòn bạc đạn (Động cơ khi chạy có tiếng kêu to khó chịu, chạy nhanh bị nóng)
- Động cơ bị hư phanh (Động cơ khi cấp nguồn phanh không thấy cuộn phanh hút hoặc có hút nhưng phanh không mở nếu cố chạy driver sẽ báo lỗi quá tải)
- Động cơ bị rà phanh (Động cơ vẫn hoạt động nhưng liên tục báo lỗi quá tải hoặc quá nhiệt, nhiệt độ động cơ nóng bất thường)
♦ Lỗi phần Driver servo:
- Lỗi mất nguồn (Do cháy nổ, hư main công suất PB, main điều khiển CB)
- Lỗi một gạch (Lỗi này có thể xử lý nhanh và lấy ngay trong ngày)
- Các lỗi cháy nổ (Do cấp nhầm nguồn, do chạy quá tải, do chạm chập, ngập nước, do sét đánh hoặc do các nguyên nhân khác...)
- Lỗi mạch điều khiển, EPROM, bộ vi xử lý, bộ so sánh
- Lỗi mạch công suất, cháy nổ IGBT, mạch kích xung điều khiển
- Các lỗi báo trên màn hình điều khiển (Màn hình hiển thị lỗi A.030; A.100; A.300; A.320; A.400; A.410; A.C90... )
|
Servo Yaskawa sigma II
 |
Servo Yaskawa sigma III
 |
|
Servo Yaskawa sigma V
 |
Servo Yaskawa sigma VII
 |
2. Bảng mã lỗi Servo Yaskawa thường gặp và cách xử lý.
| Mã lỗi | Nội dung lỗi |
Hướng dẫn kiểm tra và khắc phục |
| A.020 | Lỗi tham số (Parameter Checksum Error) |
- Kiểm tra lại nguồn điện, có thể nguồn điện đã bị tắt không đúng cách. - Số lần các tham số được ghi vượt quá giới hạn. - Bật và tắt nguồn điện vài lần, nếu lỗi vẫn xuất hiện thì driver có thể đã bị hư → Liên hệ với chúng tôi |
| A.030 | Lỗi mạch chính (Main Circuit Detector Error) |
- Hư driver servo → Liên hệ với chúng tôi |
| A.040 | Lỗi tham số cài đặt (Parameter Setting Error) |
- Kiểm tra lại có thể driver và motor đang không tương thích với nhau. - Kiểm tra lại tỉ số truyền điện tử, có thể đang bị cài đặt ngoài dải (Tham số cài đặt phải đáp ứng 0,001 <(Pn20E / Pn210 <4000)). - Driver có thể đã bị hư phần cứng → Liên hệ với chúng tôi |
| A.041 | Lỗi cài đặt độ phân giải đầu ra Encoder (Encoder Output Pulse Setting Error) |
- Độ phân giải đầu ra bộ mã hóa (Pn281) nằm ngoài phạm vi cài đặt và không đáp ứng điều kiện cài đặt → Kiểm tra lại thông số Pn281 và đặt Pn281 thành một giá trị chính xác. |
| A.100 | Quá dòng hoặc quá nhiệt (Overcurrent or Heat Sink Overheated) |
- Kiểm tra lại hệ thống dây động lực từ driver đến động cơ có thể dây đang bị nhỏ hơn so với tiêu chuẩn, các tiếp xúc đấu nối có thể không tốt hoặc dây bị rò, chạm chập, ngắn mạch ... - Kiểm tra lại phần phanh động (DB: Dừng khẩn cấp được thực hiện từ SERVOPACK) có thể thường xuyên được kích hoạt, hoặc cảnh báo quá tải DB xảy ra. Kiểm tra màn hình tiêu thụ điện trở Un00B để xem DB đã được sử dụng. Hoặc, kiểm tra lịch sử cảnh báo Fn000 để xem liệu cảnh báo quá tải DB A.730 hoặc A.731 đã được cảnh báo. - Kiểm tra lại giá trị Un00A để xem mức độ hoạt động của điện trở xả, có thể giá trị điện trở xả đang quá nhỏ. - Giảm tải cho động cơ vì có thể động cơ đang kéo tải trọng quá lớn. - Giảm tải hoặc bỏ tải cho động cơ rồi tắt nguồn và chạy lại nếu vẫn lỗi thì khả năng cao driver bị hư → Liên hệ với chúng tôi |
| A.300 | Lỗi tái sinh (Regeneration Error) |
- Với các dòng SGDV-R70, -R90, -1R6 hoặc -2R8 khi tham số Pn600 được đặt thành giá trị khác không nhưng điện trở xả bên ngoài chưa được kết nối → Kiểm tra lại việc kết nối với trở xả ngoài. - Với các dòng sử dụng trở xả nội cần kiểm tra cầu nối giữa B2 và B3 có thể đang bị ngắt không được nối với nhau → Kiểm tra đảm bảo B2 nối thông B3 và trở xả nội còn sống. - Nếu loại bỏ các nguyên nhân trên mà vẫn chưa hết lỗi rất có thể driver đã bị hư → Liên hệ với chúng tôi |
| A.320 | Quá tải tái sinh (Regenerative Overload) |
- Kiểm tra lại điện áp nguồn cung cấp xem có bị vượt quá giới hạn cho phép hay không? - Kiểm tra lại phần điện trở xả bên ngoài có thể công suất điện trở xả đang quá nhỏ do năng lượng tái sinh liên tục quá lớn → Tăng công suất điện trở xả. - Driver servo bị lỗi → Liên hệ với chúng tôi |
| A.330 | Lỗi nguồn cấp mạch chính (Main Circuit Power Supply Wiring Error) |
- Kiểm tra lại điện trở xả nội tích hợp bên trong servo (Hoặc trở xả được lắp đặt bên ngoài) có thể trở bị hư hoặc mất kết nối với driver dẫn đến điện áp DC dâng lên mà không được xả gây lỗi. - Kiểm tra lại chắc chắn phần nguồn cấp đầu vào, có thể điện áp cấp nguồn chưa đúng. - Công suất điện trở tái sinh (Pn600) không được cài đặt bằng 0 trong trường hợp điện trở tái sinh đã bị ngắt kết nối → Khi không kết nối điện trở xả cần đặt Pn600 = 0. - Khi kiểm tra hết các nguyên nhân bên trên mà vẫn chưa hết lỗi thì có thể driver servo bị lỗi phần cứng → Liên hệ với chúng tôi |
| A.400 | Quá áp (Overvoltage) |
- Dùng đồng hồ đo điện áp kiểm tra lại nguồn điện cung cấp xem có vượt quá dải cho phép hay không? (Với servo 200VAC không vượt quá 290V. Với servo 400VAC không vượt quá 580V). - Nguồn điện cung cấp có thể không ổn định hoặc bị ảnh hưởng trước đó bởi sét đánh (Điện áp nguồn cấp phải nằm trong dải 230~270V với servo 220VAC và 480~560V với servo 400VAC) → Ổn định lại nguồn điện cung cấp. - Kiểm tra lại phần điện trở xả của servo có thể trở xả bị hư, mất kết nối hoặc giá trị điện trở hiện tại không phù hợp với quy trình chạy xả hiện tại của servo. - Có thể quán tính tải quá lớn, thời gian tăng, giảm tốc đang đặt quá nhỏ → Tăng thời gian tăng giảm tốc. - Sau khi kiểm tra và loại trừ hết các nguyên nhân trên → Tắt nguồn driver rồi bật lại nếu lỗi vẫn xuất hiện → Driver bị hư phần cứng → Liên hệ với chúng tôi |
| A.410 | Thấp áp (Undervoltage) |
- Dùng đồng hồ đo điện áp kiểm tra lại nguồn điện cung cấp xem có bị thấp hơn dải cho phép hay không? (Với servo 200VAC không nhỏ hơn 120V. Với servo 400VAC không nhỏ hơn 240V). - Kiểm tra lại nguồn điện cung cấp có thể không ổn định, bị sụt áp trong quá trình hoạt động → Ổn định lại nguồn điện cung cấp. - Lỗi có thể xảy ra khi servo bị cắt nguồn điện đột ngột → Khi thời gian giữ cắt điện tức thời Pn509 được đặt hãy giảm cài đặt tham số này. - Sau khi kiểm tra và loại trừ hết các nguyên nhân trên → Tắt nguồn driver rồi bật lại nếu lỗi vẫn xuất hiện → Driver bị hư phần cứng → Liên hệ với chúng tôi |
| A.450 | Quá áp tụ điện mạch chính (Main-Circuit Capacitor Overvoltage) |
- Driver servo bị lỗi phần cứng → Liên hệ với chúng tôi |
| A.510 | Quá tốc độ (Overspeed) |
- Kiểm tra lại thứ tự U, V, W của động cơ nối về driver có thể đang bị sai thứ tự hoặc kết nối chưa chính xác → Đấu nối lại cho chính xác. - Kiểm tra lại các giá trị cài đặt độ lợi có thể đang cài đặt vượt quá dải tốc độ cho phép của động cơ → Kiểm tra tốc độ thực tế tại thời điểm bị lỗi và hiệu chỉnh tham số cài đặt độ lợi cho phù hợp. - Sau khi kiểm tra và loại trừ hết các nguyên nhân trên → Tắt nguồn driver rồi bật lại nếu lỗi vẫn xuất hiện → Driver bị hư phần cứng → Liên hệ với chúng tôi |
| A.511 | Quá tốc độ xung đầu ra encoder (Overspeed of Encoder Output Pulse Rate) |
- Tần số xung đầu ra đầu ra của bộ mã hóa có thể đang bị vượt quá giới hạn, kiểm tra cài đặt đầu ra xung đầu ra của bộ mã hóa → Giảm cài đặt độ phân giải đầu ra bộ mã hóa (Pn281). - Tốc độ động cơ quá cao làm xung đầu ra của bộ mã hóa bị vượt quá giới hạn → Giảm tốc độ động cơ. |
| A.520 | Cảnh báo rung lắc (Vibration Alarm) |
- Động cơ có thể đang bị rung lắc bất thường khi hoạt động, cần kiểm tra lại tốc độ hoạt động của động cơ → Giảm tốc độ động cơ hoặc giảm độ lợi của vòng tốc độ (Pn100). - Giá trị tỷ lệ khối lượng (Pn103) lớn hơn giá trị thực hoặc đã bị thay đổi quá nhiều cần kiểm tra lại tỷ lệ khối lượng và đặt tỷ lệ khối lượng (Pn103) ở một giá trị thích hợp. |
| A.521 | Cảnh báo tự động dò tìm (Autotuning Alarm) |
- Động cơ bị rung lên đáng kể khi thực hiện về gốc, cần kiểm tra lại dạng sóng tốc độ động cơ → Giảm tải để tỷ lệ khối lượng nằm trong giá trị cho phép, hoặc nâng mức điều chỉnh hoặc giảm mức khuếch đại bằng cách sử dụng chức năng điều chỉnh ít hơn (Fn200). - Kiểm tra lại quy trình hoạt động của chức năng tương ứng và có hướng điều chỉnh phù hợp. |
| A.550 | Lỗi cài đặt tốc độ lớn nhất (Maximum Speed Setting Error) |
- Kiểm tra lại cài đặt Pn385 và Un010 có thể đang để lớn hơn tốc độ tối đa cho phép hoặc độ phân giải đầu ra bộ mã hóa → Đặt Pn385 thành giá trị bằng hoặc thấp hơn tốc độ tối đa của động cơ. |
| A.710 A.720 |
Quá tải ngắn hạn (Overload: High Load) Quá tải liên tục (Overload: Low Load) |
Liên hệ |
| A.730 A.731 |
Quá tải phanh động (Dynamic Brake Overload) |
Liên hệ |
| A.740 | Quá tải điện trở GH dòng điện (Overload of Surge Current Limit Resistor) |
Liên hệ |
| A.7A0 | Tản nhiệt quá nóng (Heat Sink Overheated) |
Liên hệ |
| A.7AB | Quạt làm mát servo dừng (Built-in Fan in SERVOPACK Stopped) |
Liên hệ |
| A.820 | Lỗi encoder (Encoder Checksum Error) |
Liên hệ |
| A.840 | Lỗi dữ liệu encoder (Encoder Data Error) |
Liên hệ |
| A.850 | Lỗi quá tốc độ encoder (Encoder Overspeed) |
Liên hệ |
| A.860 | Lỗi encoder quá nóng (Encoder Overheated) |
Liên hệ |
| A.861 | Động cơ quá nóng (Motor Overheated) |
Liên hệ |
| A.890 | Lỗi tỉ lệ bộ mã hóa (Encoder Scale Error) |
Liên hệ |
| A.891 | Lỗi module bộ mã hóa (Encoder Module Error) |
Liên hệ |
| A.b31 | Lỗi pha U (Current Detection Error1 Phase-U) |
Liên hệ |
| A.b32 | Lỗi pha V (Current Detection Error 2 Phase-V) |
Liên hệ |
| A.b33 | Lỗi pha W (Current Detection Error 3 Current detector) |
Liên hệ |
| A.C10 | Tràn servo (Servo Overrun Detected) |
Liên hệ |
| A.C20 | Lỗi phát hiện pha (Phase Detection Error) |
Liên hệ |
| A.C21 | Lỗi cảm biến (Hall Sensor Error) |
Liên hệ |
| A.C80 | Lỗi xóa bộ mã hóa tuyệt đối (Absolute Encoder Clear Error) |
Liên hệ |
| A.C90 | Lỗi giao tiếp bộ mã hóa (Encoder Communications Error) |
Liên hệ |
| A.C91 | Lỗi giao tiếp vị trí bộ mã hóa (Encoder Communications Position Data Error) |
Liên hệ |
| A.C92 | Lỗi hẹn giờ giao tiếp bộ mã hóa (Encoder Communications Timer Error) |
Liên hệ |
| A.CA0 | Lỗi tham số bộ mã hóa (Encoder Parameter Error) |
Liên hệ |
| A.Cb0 | Lỗi tiếng vọng bộ mã hóa (Encoder Echoback Error) |
Liên hệ |
| A.CF1 | Lỗi truyền thông (Feedback Option Module Communications Error) |
Liên hệ |
| A.CF2 | Lỗi truyền thông (Feedback Option Module Communications Error) |
Liên hệ |
| A.d00 | Lỗi vị trí tràn xung (Position Error Pulse Overflow) |
Liên hệ |
| A.d01 | Cảnh bảo tràn xung lỗi vị trí khi servo ON (Position Error Pulse Overflow Alarm at Servo ON) |
Liên hệ |
| A.d02 | Lỗi tràn xung vị trí theo giới hạn tốc độ khi servo ON (Position Error Pulse Overflow Alarm by Speed Limit at Servo ON) |
Liên hệ |
→ Như các lỗi phổ biến theo bảng trên chúng ta có thể tổng hợp lại như sau:
- Với trường hợp các lỗi do bị tác động từ các yếu tố bên ngoài như: Kẹt cơ khí, hư hộp số, lỏng cáp, đứt cáp, lộn thứ tự U, V, W... đa phần người dùng có thể tự xử lý lỗi khi có sự hướng dẫn từ xa qua điện thoại của chúng tôi.
- Với các trường hợp lỗi do thiết bị như: Hư encoder, hư IGBT, hư main phần cứng, hư CPU, hư nguồn, hư biến áp... người dùng cần gửi trực tiếp lên văn phòng công ty chúng tôi để được bộ phận bảo trì kiểm tra và báo giá thay thế, sửa chữa.
- Với các trường hợp lỗi xảy ra khi người dùng lắp đặt servo mới, các lỗi có thể do: Nhầm thứ tự cáp nguồn, lộn dây điều khiển I/O, lộn hoặc lỏng cáp encoder, cài đặt sai chế độ, tải lắp không phù hợp hoặc do các tham số hiệu chỉnh được cài đặt chưa đúng ... → Trường hợp này vui lòng liên hệ trực tiếp với chúng tôi để được hỗ trợ một cách tốt nhất.














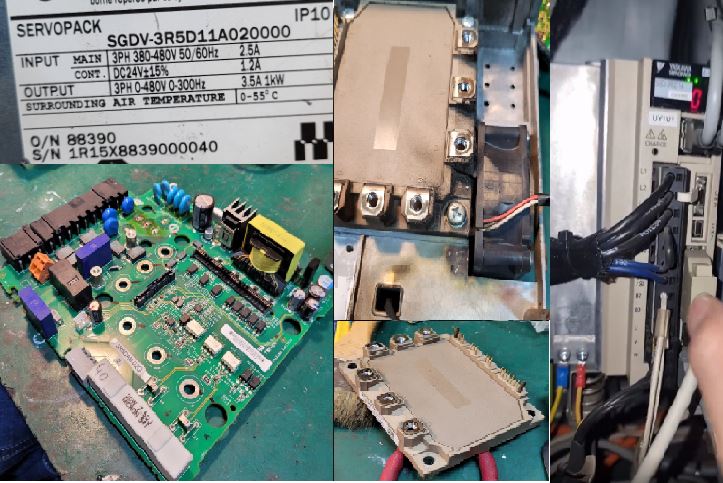
3.1. Sửa chữa driver servo Yaskawa SGDV-3R5D11A020000 công suất 1kW điện 3P 380VAC
- Tình trạng: Driver khi ON trục chạy báo lỗi A100

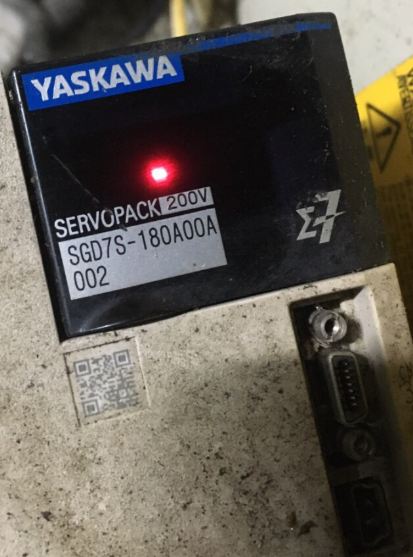
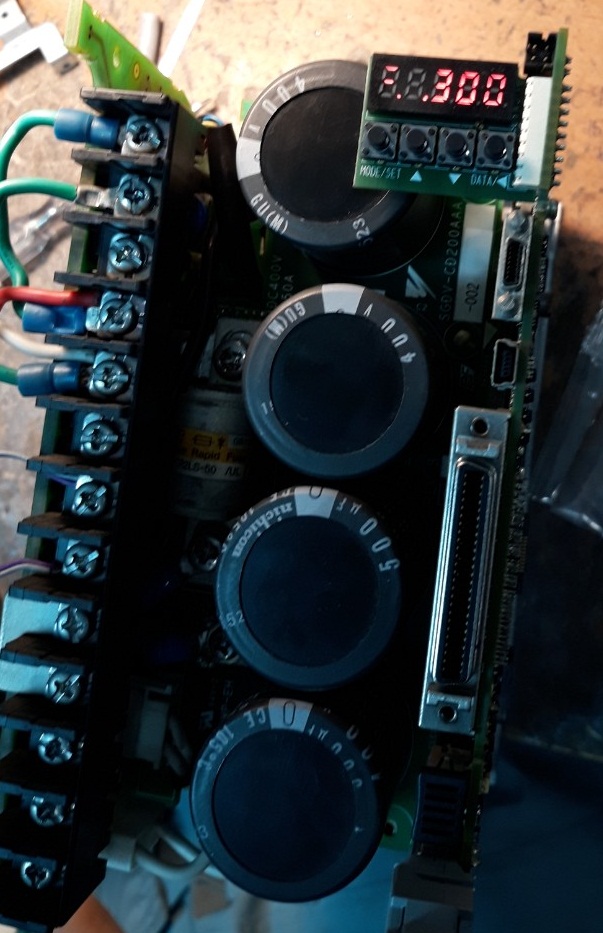
3.2. Sửa chữa driver servo Yaskawa sigma 7 công suất 750W và 1kW
- Tình trạng: Driver lỗi 1 chấm, A.100 (Hư công suất IGBT) và A.410 (Thấp áp)

3.3. Sửa chữa driver servo Yaskawa SGDV-1R9D11A020000 công suất 0.5kW điện 3P 380VAC cho máy nghành kính
- Tình trạng: Driver lỗi A.410 (Thấp áp)

3.4. Sửa chữa driver servo Yaskawa SGDV-3R5D11A020000 công suất 1kW điện 3P 380VAC cho máy kính
- Tình trạng: Driver bị cháy nổ mạch công suất, hư công suất IGBT
4. Những lợi thế mà chúng tôi đang có.
- Độ ngũ kỹ thuật tay nghề cao, có nhiều năm kinh nghiệm thực tế nhiều năm trong nghành tự động hóa đặc biệt là Servo, Biến tần, PLC và HMI.
- Được đầu tư trang thiết bị máy móc phục vụ cho quá trình đo đạc, kiểm tra, phát hiện sự cố và sửa chữa thiết bị điện tử hiện đại.
- Kho linh kiện thay thế luôn có sẵn với đầy đủ các linh kiện phổ biến của tất cả các hãng đảm bảo xử lý sự cố máy móc, thiết bị cho khách hàng một cách nhanh nhất.
- Với trường hợp driver lỗi CPU mất hết chương trình, sau khi sửa chữa xong sẽ được chúng tôi hỗ trợ cài đặt lại đúng như nguyên bản ban đầu khách hàng sẽ không phải lo chuyện làm thế nào để cài đặt lại chạy như cũ.
- Toàn bộ servo sau khi sửa chữa tại công ty chúng tôi đều được Bảo hành 3-6 tháng tùy thuộc vào thời gian sử dụng trước đó của Servo.
- Các thiết bị sau khi sửa chữa đều được test kiểm tra đo đạc có tải, không tải cẩn thận, thiết bị trước khi giao trả khách đều được đội ngũ kỹ sư của chúng tôi tư vấn, phân tích nguyên nhân gây hư hỏng thiết bị cho khách hàng giúp khách hàng hiểu được gốc dễ nguyên nhân gây hư hỏng thiết bị để có các can thiệp cải tiến kịp thời, tránh các sự cố tương tự có thể tiếp tục xảy ra gây gián đoạn sản xuất.
- Nếu các lỗi gặp phải không phải do phần cứng mà chỉ do phần mềm, có thể xử lý bằng cài đặt chúng tôi sẽ hỗ trợ Quý khách hàng khắc phục miễn phí qua điện thoại.
- Chúng tôi có mối quan hệ lâu năm với các đơn vị là đại diện nhà phân phối các hãng tại thị trường Việt Nam. Nếu với những trường hợp bị hư hỏng nặng không thể sửa chữa, thay thế linh kiện chúng tôi sẽ liên hệ với nhà cung cấp chính hãng để thay thế bo mạch mới đúng với model cũ với giá thành cạnh tranh nhất.
- Ngoài dịch vụ về sửa chữa, khi khách hàng có nhu cầu chúng tôi còn cung cấp các dịch vụ: Tư vấn thay thế mới, thiết kế, lắp đặt, cài đặt mới Servo các hãng với giả cả rất cạnh tranh.
4. Tiêu chí hoạt động.
* Dịch vụ sửa chữa Servo của chúng tôi hoạt động trên tiêu chí 3 NHẤT:
⇒ Thời gian sửa chữa nhanh nhất.
⇒ Chi phí sửa chữa thấp nhất.
⇒ Chế độ bảo hành, hỗ trợ sau sửa chữa tốt nhất.
»»» Với những lợi thế như trên chúng tôi tự tin sẽ khắc phục được tất cả các lỗi gặp phải trên tất cả các hãng Servo, với dịch vụ hỗ trợ tốt nhất.
- Với các trường hợp lỗi do thiết bị như: Hư encoder, hư IGBT, hư main phần cứng, hư CPU, hư nguồn, hư biến áp... người dùng cần gửi trực tiếp lên văn phòng công ty chúng tôi để được bộ phận bảo trì kiểm tra và báo giá thay thế, sửa chữa.
- Với các trường hợp lỗi xảy ra khi người dùng lắp đặt servo mới, các lỗi có thể do: Nhầm thứ tự cáp nguồn, lộn dây điều khiển I/O, lộn hoặc lỏng cáp encoder, cài đặt sai chế độ, tải lắp không phù hợp hoặc do các tham số hiệu chỉnh được cài đặt chưa đúng ... → Trường hợp này vui lòng liên hệ trực tiếp với chúng tôi để được hỗ trợ một cách tốt nhất.
3. Hình ảnh một số lỗi thường gặp của servo Yaskawa đã được chúng tôi khắc phục.
3.1. Sửa chữa driver servo Yaskawa SGDV-3R5D11A020000 công suất 1kW điện 3P 380VAC
- Tình trạng: Driver khi ON trục chạy báo lỗi A100
3.2. Sửa chữa driver servo Yaskawa sigma 7 công suất 750W và 1kW
- Tình trạng: Driver lỗi 1 chấm, A.100 (Hư công suất IGBT) và A.410 (Thấp áp)
3.3. Sửa chữa driver servo Yaskawa SGDV-1R9D11A020000 công suất 0.5kW điện 3P 380VAC cho máy nghành kính
- Tình trạng: Driver lỗi A.410 (Thấp áp)
3.4. Sửa chữa driver servo Yaskawa SGDV-3R5D11A020000 công suất 1kW điện 3P 380VAC cho máy kính
- Tình trạng: Driver bị cháy nổ mạch công suất, hư công suất IGBT
- Độ ngũ kỹ thuật tay nghề cao, có nhiều năm kinh nghiệm thực tế nhiều năm trong nghành tự động hóa đặc biệt là Servo, Biến tần, PLC và HMI.
- Được đầu tư trang thiết bị máy móc phục vụ cho quá trình đo đạc, kiểm tra, phát hiện sự cố và sửa chữa thiết bị điện tử hiện đại.
- Kho linh kiện thay thế luôn có sẵn với đầy đủ các linh kiện phổ biến của tất cả các hãng đảm bảo xử lý sự cố máy móc, thiết bị cho khách hàng một cách nhanh nhất.
- Với trường hợp driver lỗi CPU mất hết chương trình, sau khi sửa chữa xong sẽ được chúng tôi hỗ trợ cài đặt lại đúng như nguyên bản ban đầu khách hàng sẽ không phải lo chuyện làm thế nào để cài đặt lại chạy như cũ.
- Toàn bộ servo sau khi sửa chữa tại công ty chúng tôi đều được Bảo hành 3-6 tháng tùy thuộc vào thời gian sử dụng trước đó của Servo.
- Các thiết bị sau khi sửa chữa đều được test kiểm tra đo đạc có tải, không tải cẩn thận, thiết bị trước khi giao trả khách đều được đội ngũ kỹ sư của chúng tôi tư vấn, phân tích nguyên nhân gây hư hỏng thiết bị cho khách hàng giúp khách hàng hiểu được gốc dễ nguyên nhân gây hư hỏng thiết bị để có các can thiệp cải tiến kịp thời, tránh các sự cố tương tự có thể tiếp tục xảy ra gây gián đoạn sản xuất.
- Nếu các lỗi gặp phải không phải do phần cứng mà chỉ do phần mềm, có thể xử lý bằng cài đặt chúng tôi sẽ hỗ trợ Quý khách hàng khắc phục miễn phí qua điện thoại.
- Chúng tôi có mối quan hệ lâu năm với các đơn vị là đại diện nhà phân phối các hãng tại thị trường Việt Nam. Nếu với những trường hợp bị hư hỏng nặng không thể sửa chữa, thay thế linh kiện chúng tôi sẽ liên hệ với nhà cung cấp chính hãng để thay thế bo mạch mới đúng với model cũ với giá thành cạnh tranh nhất.
- Ngoài dịch vụ về sửa chữa, khi khách hàng có nhu cầu chúng tôi còn cung cấp các dịch vụ: Tư vấn thay thế mới, thiết kế, lắp đặt, cài đặt mới Servo các hãng với giả cả rất cạnh tranh.
4. Tiêu chí hoạt động.
* Dịch vụ sửa chữa Servo của chúng tôi hoạt động trên tiêu chí 3 NHẤT:
⇒ Thời gian sửa chữa nhanh nhất.
⇒ Chi phí sửa chữa thấp nhất.
⇒ Chế độ bảo hành, hỗ trợ sau sửa chữa tốt nhất.
»»» Với những lợi thế như trên chúng tôi tự tin sẽ khắc phục được tất cả các lỗi gặp phải trên tất cả các hãng Servo, với dịch vụ hỗ trợ tốt nhất.
LIÊN HỆ 0384 577 377
5. Quy trình tiếp nhận sửa chữa Servo.
♦ Bước 1: Tiếp nhận thông tin từ phía khách hàng
- Trao đổi trực trực tiếp thông tin với khách hàng để đánh giá sơ bộ tình trạng.
- Hướng dẫn khách hàng kiểm tra sơ bộ để loại trừ xem có đúng servo bị lỗi không?
♦ Bước 2: Khảo sát thực tế tại nhà máy (Nếu khách hàng yêu cầu)
- Tùy tình trạng từng trường hợp cụ thể nếu khách hàng yêu cầu khảo sát thực tế để đánh giá công ty DKN sẽ bối trí người qua kiểm tra trực tiếp tại nhà máy khách hàng.
♦ Bước 3: Tiếp nhận thiết bị
- Khách hàng chuyển trực tiếp thiết bị đến văn phòng công công ty DKN để được tiến hành kiểm tra thực tế.
- Nếu khách hàng có nhu cầu đến lấy thiết bị trực tiếp tại nhà máy công ty DKN cũng sẵn sàng hỗ trợ một cách nhanh nhất.
♦ Bước 4: Vệ sinh, kiểm tra
- Sau khi thiết bị được tiếp nhận bộ phận kỹ thuật sẽ tiến hành vệ sinh bụi bẩn trên thiết bị.
- Tháo lắp, đo kiểm tra thực tế thiết bị.
♦ Bước 5: Báo giá
- Thiết bị sau khi được kiểm tra cẩn thận sẽ được báo giá chi phí sửa chữa cho khách hàng dựa trên thực tế tình trạng hư hỏng.
♦ Bước 6: Sửa chữa
- Báo giá sau khi được khách hàng đồng ý chấp nhận phía công ty DKN sẽ tiến hành thay thế, sửa chữa các thiết bị hư hỏng.
- Thiết bị sau khi được sửa chữa hoàn thiện sẽ được chạy test thử không tải, có tải tại xưởng công ty DKN.
♦ Bước 7: Bàn giao - Thanh toán
- Thiết bị sau khi được sửa chữa kiểm tra chạy thử đạt tiêu chuẩn sẽ được bàn giao lại cho khách hàng.
- Việc thanh toán sẽ dựa trên thông tin thống nhất về điều khoản thanh toán của 2 bên theo báo giá.
♦ Bước 8: Bảo hành
- Toàn bộ thông tin về tình trạng thiết bị, ngày tiếp nhận và bàn giao sẽ được công ty DKN lưu trữ lại.
- Thời gian bảo hành 3-6 tháng tính từ ngày bàn giao thiết bị. Công ty DKN cam kết thực hiện đúng theo các điều khoản trên báo giá.
- Trao đổi trực trực tiếp thông tin với khách hàng để đánh giá sơ bộ tình trạng.
- Hướng dẫn khách hàng kiểm tra sơ bộ để loại trừ xem có đúng servo bị lỗi không?
♦ Bước 2: Khảo sát thực tế tại nhà máy (Nếu khách hàng yêu cầu)
- Tùy tình trạng từng trường hợp cụ thể nếu khách hàng yêu cầu khảo sát thực tế để đánh giá công ty DKN sẽ bối trí người qua kiểm tra trực tiếp tại nhà máy khách hàng.
♦ Bước 3: Tiếp nhận thiết bị
- Khách hàng chuyển trực tiếp thiết bị đến văn phòng công công ty DKN để được tiến hành kiểm tra thực tế.
- Nếu khách hàng có nhu cầu đến lấy thiết bị trực tiếp tại nhà máy công ty DKN cũng sẵn sàng hỗ trợ một cách nhanh nhất.
♦ Bước 4: Vệ sinh, kiểm tra
- Sau khi thiết bị được tiếp nhận bộ phận kỹ thuật sẽ tiến hành vệ sinh bụi bẩn trên thiết bị.
- Tháo lắp, đo kiểm tra thực tế thiết bị.
♦ Bước 5: Báo giá
- Thiết bị sau khi được kiểm tra cẩn thận sẽ được báo giá chi phí sửa chữa cho khách hàng dựa trên thực tế tình trạng hư hỏng.
♦ Bước 6: Sửa chữa
- Báo giá sau khi được khách hàng đồng ý chấp nhận phía công ty DKN sẽ tiến hành thay thế, sửa chữa các thiết bị hư hỏng.
- Thiết bị sau khi được sửa chữa hoàn thiện sẽ được chạy test thử không tải, có tải tại xưởng công ty DKN.
♦ Bước 7: Bàn giao - Thanh toán
- Thiết bị sau khi được sửa chữa kiểm tra chạy thử đạt tiêu chuẩn sẽ được bàn giao lại cho khách hàng.
- Việc thanh toán sẽ dựa trên thông tin thống nhất về điều khoản thanh toán của 2 bên theo báo giá.
♦ Bước 8: Bảo hành
- Toàn bộ thông tin về tình trạng thiết bị, ngày tiếp nhận và bàn giao sẽ được công ty DKN lưu trữ lại.
- Thời gian bảo hành 3-6 tháng tính từ ngày bàn giao thiết bị. Công ty DKN cam kết thực hiện đúng theo các điều khoản trên báo giá.
Thông tin liên hệ để được hỗ trợ tư vấn
Kỹ sư: NGUYỄN VĂN MINH - HP: 0384 577 377 (Zalo)