

















Sửa chữa servo Delta - Sửa chữa servo giá rẻ
♦ Với yêu cầu ngày càng khắt khe về tính chính xác trong các cơ cấu truyền động của hệ thống máy móc công nghiệp hiện nay, việc sử dụng động cơ servo đang ngày càng trở nên phổ biến và là yêu cầu bắt buộc để đảm bảo tính chính xác.♦ Hiện tại trên thị trường Servo Delta đang được sử dụng phổ biến và rộng dãi nhất với ưu điểm: Chất lượng tốt, giá thành rẻ, chế độ bảo hành, hỗ trợ kỹ thuật bên nhà phân phối tại Việt Nam uy tín.
♦ Chúng tôi hiện tại là nhà phân phối chính thức các sản phẩm hãng Delta như: Biến tần, PLC, HMI, Đồng hồ nhiệt, Bộ nguồn... và đặc biệt là Servo Delta, ngoài việc cung cấp thiết bị mới để hỗ trợ khách hàng chúng tôi còn hỗ trợ KHẮC PHỤC LỖI VÀ SỬA CHỮA SERVO DELTA với những linh kiện được nhập khẩu chính hãng đảm bảo thiết bị sau khi sửa chữa hoạt động tốt đúng như nguyên bản ban đầu.
♦ Các dòng servo Delta chúng tôi nhận sửa chữa bao gồm: ASDA-MS, ASDS-M, ASDA-A3, ASDA-A2, ASDA-B3, ASDA-B2, ASDA-AB, ASDA-A, ASDA-B. Dịch cụ sửa chữa đảm bảo nhanh nhất, giá thành tốt nhất và chế độ bảo hành uy tín nhất.
LIÊN HỆ 0384 577 377
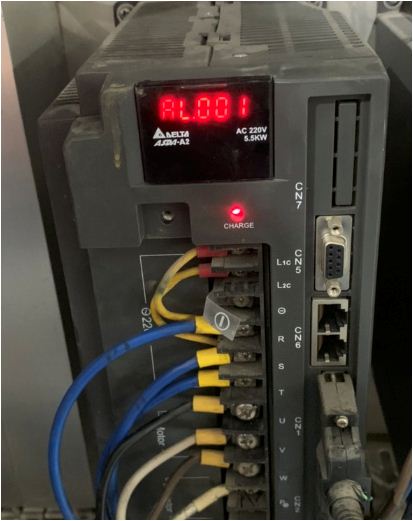
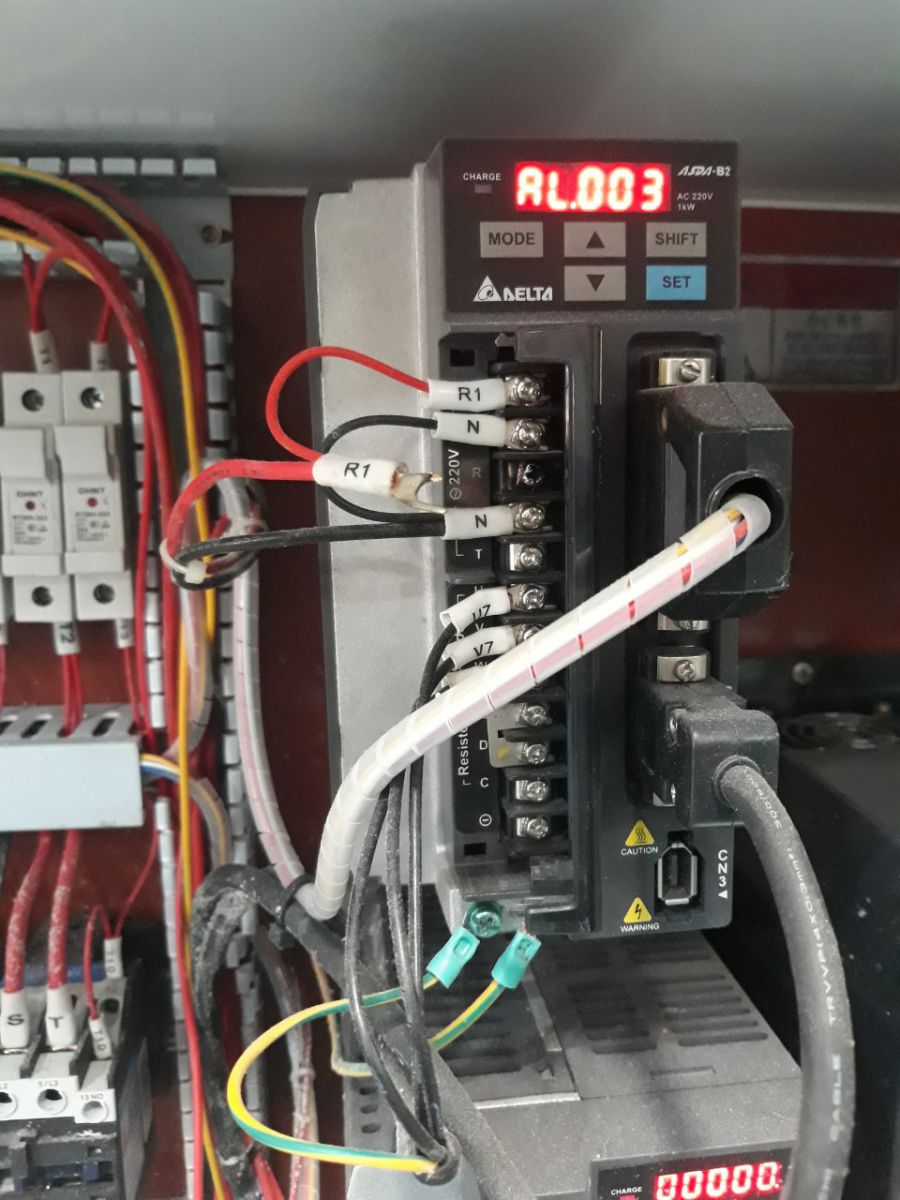
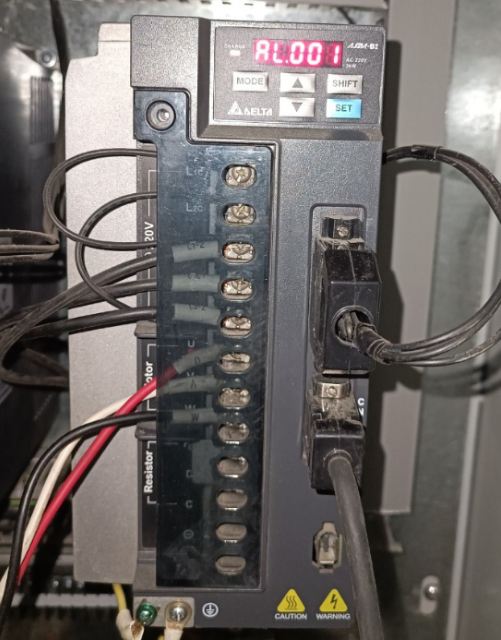
1. Hình ảnh một số lỗi thường gặp của Servo Delta đã được chúng tôi khắc phục.

.JPG)









.jpg)
.jpg)







2. Một số trường hợp sửa chữa servo Delta tiêu biểu cho khách hàng.
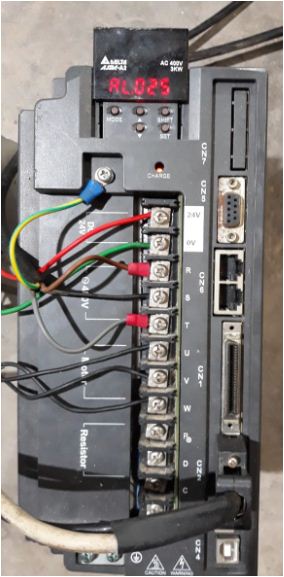
2.1. Sửa chữa thay Encoder động cơ servo Delta 3kW cho nhà máy bao bì.
- Tình trạng: Driver cấp nguồn lên báo lỗi AL025 luôn không vận hành được.
.JPG)
2.2. Sửa chữa thay Encoder động cơ servo Delta 4.5kW cho nhà máy sản xuất chai nhựa.
- Tình trạng: Driver cấp nguồn lên báo lỗi AL011 máy dừng không cho hoạt động.
- Tình trạng: Driver cấp nguồn lên báo lỗi AL011 máy dừng không cho hoạt động.

2.3. Sửa chữa thay Encoder động cơ servo Delta 15kW cho nhà máy sản xuất ống thép
- Tình trạng: Động cơ vị va đập trong quá trình chạy máy làm hư encoder phía đuôi
- Tình trạng: Động cơ vị va đập trong quá trình chạy máy làm hư encoder phía đuôi

2.4. Sửa chữa thay Encoder tuyệt đối (Absolute) cho động cơ servo Delta 1.5kW có phanh nhà máy sản xuất hộp xốp nhựa
- Tình trạng: Động cơ bị kẹt do hư phanh khách hàng tự ý tháo sửa động cơ làm vỡ encoder + cong trục

2.5. Sửa chữa driver ASD-A2-2023-E và ASD-A2-3023-E chạy mạng EtherCAT cho máy sản xuất chai nhựa
- Tình trạng: Driver chạy động cơ giật, kêu to sai kích thước rồi báo lỗi AL006, AL009

2.6. Sửa chữa động cơ servo Delta ECMA-F11875S3 cho nhà máy sản xuất khay, hộp nhựa
- Tình trạng: Bật điện nguồn driver báo lỗi AL004


2.8. Sửa chữa thay Encoder loạt động cơ servo 2kW, 3kW, 5.5kW và 7.5kW cho nhà máy bao bì

2.9. Sửa chữa động cơ servo 7.5kW có phanh và không phanh cho nhà máy sản xuất tấm Film cách nhiệt

2.7. Sửa chữa động cơ servo Delta ECMA-L11855R3 công suất 5.5kW cho nhà máy sản xuất hộp đựng linh kiện điện tử
- Tình trạng: Bật điện nguồn driver báo lỗi AL024, AL025
2.8. Sửa chữa thay Encoder loạt động cơ servo 2kW, 3kW, 5.5kW và 7.5kW cho nhà máy bao bì
- Tình trạng: Động cơ hư encoder bật nguồn driver báo lỗi AL025, AL011, AL024
2.9. Sửa chữa động cơ servo 7.5kW có phanh và không phanh cho nhà máy sản xuất tấm Film cách nhiệt
- Tình trạng: Động cơ lỗi Encoder AL025 và chạy giật, có tiếng kêu to
2.9. Sửa chữa động cơ servo 11kW có phanh cho nhà máy sản xuất khay đựng linh kiện
- Tình trạng: Động cơ lỗi Encoder AL033 do bị xông điện ra vỏ máy

2.10. Sửa chữa động cơ servo Delta 3kW có phanh ECMA-E11830QS cho nhà máy sản xuất phôi chai nước uống tinh khiết
- Tình trạng: Động cơ lỗi Encoder, khi bật nguồn driver báo lỗi AL024

2.11. Sửa chữa 05 bộ điều khiển servo ASD-B2-0721-B cho nhà máy sản xuất chỉ
- Tình trạng: Driver lỗi cháy nổ, không lên nguồn

3. Các lỗi AC Servo Delta thường gặp và cách xử lý.
- Lỗi Motor Servo Delta: Hư Encoder, Kẹt do tải, Mòn cơ khí đầu trục, Vỡ ổ bi, Mòn bạc đạn, Hư cuộn phanh, Vỡ má phanh, cháy chập cuộn dây Stator, hư cuộn dây Roto ...
- Lỗi Driver Servo Delta: Hư nguồn, hư IGBT, lỗi main công suất PB, lỗi main điều khiển CB... Các lỗi báo trên màn hình AL001, AL002, AL003..., AL006, AL007, AL008, AL009.., AL011..., AL026, AL027, AL028.
- Lỗi Motor Servo Delta: Hư Encoder, Kẹt do tải, Mòn cơ khí đầu trục, Vỡ ổ bi, Mòn bạc đạn, Hư cuộn phanh, Vỡ má phanh, cháy chập cuộn dây Stator, hư cuộn dây Roto ...
- Lỗi Driver Servo Delta: Hư nguồn, hư IGBT, lỗi main công suất PB, lỗi main điều khiển CB... Các lỗi báo trên màn hình AL001, AL002, AL003..., AL006, AL007, AL008, AL009.., AL011..., AL026, AL027, AL028.
* Bảng mã lỗi và hướng dẫn cách khắc phục:
| Mã lỗi | Nội dung lỗi |
Hướng dẫn kiểm tra và khắc phục |
| AL001 | Lỗi quá dòng (Over current) |
- Kiểm tra lại thứ tự cáp nguồn kết nối giữa Driver và Động cơ có thể bị sai thứ tự U, V, W. - Kiểm tra lại cáp nguồn kết nối giữa Driver và Động cơ xem có bị đứt, lỏng hoặc chập ngầm không? - IGBT bị hư → Liên hệ với chúng tôi |
| AL002 | Lỗi quá áp (Over voltage) |
- Dùng đồng hồ đo kiểm tra lại điện áp nguồn đầu cấp vào Driver xem có bị vượt quá giới hạn cho phép của servo không? |
| AL003 | Lỗi thấp áp (Under voltage) |
- Dùng đồng hồ đo kiểm tra lại điện áp nguồn đầu cấp vào Driver xem có bị thấp hơn so với giới hạn cho phép của servo không? - Kiểm tra lại nguồn cấp cho Driver xem có bị mất pha không? - Lỗi board công suất → Liên hệ với chúng tôi |
| AL004 | Lỗi động cơ (Motor combination error) |
- Kiểm tra lại encoder của động cơ. - Kiểm tra lại cáp encoder. - Kiểm tra lại động cơ xem đã lắp đúng loại tương thích với. Driver chưa? |
| AL005 | Lỗi chức năng hãm tái sinh (Regeneration error) |
- Kiểm tra lại phần kết nối giữa driver và điện trở hãm. - Kiểm tra lại tham số P1-52 và P1-53. - Nếu kiểm tra theo 2 bước trên mà driver vẫn lỗi. → Liên hệ với chúng tôi |
| AL006 | Lỗi quá tải (Overload) |
- Đặt tham số P0-02 lên 11 và kiểm tra xem momen xoắn trung bình có vượt quá 100% định mức thường xuyên không → Tăng công suất động cơ hoặc giảm tải cho động cơ - Kiểm tra xem phần động cơ có bị kẹt tải hay hư phần hộp số không? - Kiểm tra lại thời gian tăng / giảm tốc xem có để thấp quá hay không? - Kiểm tra lại tham số P2-34 xem có bị đặt nhỏ quá không? |
| AL007 | Lỗi quá tốc độ (Over speed) |
- Kiểm tra lại tín hiệu điều khiển dạng xung hoặc analog xem có điều gì bất thường không? - Kiểm tra lại tham số cài đặt P2-34 xem có bị đặt nhỏ quá không? Có thể điều chỉnh lên để hiệu chỉnh cho chính xác. |
| AL008 | Lệnh xung bất thường (Abnormal pulse command) |
- Kiểm tra lại tần số lệnh xung đầu vào servo xem có bị vượt quá giới hạn cho phép của Driver không? Có thể điều chỉnh lại tần số lệnh phát xung đầu vào servo cho chính xác. |
| AL009 | Lỗi lệch vị trí (Excessive deviation of Position Command) |
- Kiểm tra lại tham số P2-35 có thể đang bị cài đặt quá nhỏ → Có thể hiệu chỉnh tăng tham số P2-35 lên. - Kiểm tra lại giá trị cài đặt khuếch đại có thể đang bị cài đặt quá nhỏ → Hiệu chỉnh lại cho phù hợp. - Kiểm tra lại giá trị cài đặt giới hạn momen xoắn có thể đang bị cài đặt quá nhỏ → Hiệu chỉnh lại cho phù hợp. - Kiểm tra lại tải bên ngoài có thể đang bị quá tải → Hiệu chỉnh lại tải cho phù hợp giới hạn định mức của động cơ. |
| AL011 | Lỗi Encoder (Encoder Error) |
- Kiểm tra lại Jack Encoder (CN2) giữa driver và động cơ (Có thể bị đứt, chập ngầm hoặc lỏng). - Encoder bị hư → Liên hệ với chúng tôi |
| AL012 | Lỗi điều chỉnh (Adjustment error) |
- Kiểm tra lại tín hiệu đầu vào tương tự có thể chưa được nối đất. |
| AL013 | Lỗi dừng khẩn (Emergency stop) |
- Kiểm tra lại xem nút dừng khẩn cấp có được kích hoạt hay không, nếu chưa được nhấn thì nhấn kích hoạt lại. |
| AL014 | Lỗi giới hạn chiều ngược (Reverse limit error) |
- Kiểm tra lại công tắc giới hạn chiều ngược xem đã được kích hoạt chưa? Có thể công tắc bị hư. - Kiểm tra lại các tham số điều khiển và tỷ lệ quán tính hoặc có thể motor đang bị nặng tải → Đánh giá lại tải và công suất motor. |
| AL015 | Lỗi giới hạn chiều thuận (Forward limit error) |
- Kiểm tra lại công tắc giới hạn chiều thuận xem đã được kích hoạt chưa? Có ghể công tắc bị hư. - Kiểm tra lại các tham số điều khiển và tỷ lệ quán tính hoặc có thể motor đang bị nặng tải → Đánh giá lại tải và công suất motor. |
| AL016 | Lỗi quá nhiệt IGBT (IGBT Overheat) |
- Driver có thể đang bị hoạt động trong tình trạng quá tải do dòng điện từ động cơ quá lớn → Kiểm tra lại động cơ xem có bị hoạt động quá tải hay bị kẹt không? - Đầu ra driver có thể đang bị chạm chập hoặc ngắn mạch → Kiểm tra lại cáp kết nối hoặc động cơ xem có chạm chập không? Hoặc có thể IGBT trong driver bị hư. |
| AL017 | Lỗi EPPROM (Abnormal EEPROM) |
Liên hệ với chúng tôi |
| AL018 | Lỗi tín hiệu đầu ra (Abnormal signal output) |
Liên hệ với chúng tôi |
| AL019 | Lỗi kết nối (Serial communication error) |
- Kiểm tra lại các tham số cài đặt truyền thông có thể đang được cài đặt chưa đúng → Hiệu chỉnh lại các tham số cài đặt truyền thông. |
| AL020 | Lỗi mất truyền thông (Serial communication time out) |
- Kiểm tra lại tham số cài đặt về thời gian kết nối. - Kiểm tra lại cáp kết nối có thể bị chập chờn hoặc tiếp xúc không tốt dẫn đến lỗi mất kết nối. |
| AL022 | Mất pha mạch nguồn (Main circuit power lack phase) |
- Kiểm tra lại cáp cấp nguồn R, S, T xem có vấn đề gì bất thường không? Có thể bị lỏng, đứt hoặc chập chờn. |
| AL023 | Cảnh báo quá tải sớm (Early warning for overload) |
- Kiểm tra lại tải có thể đang trong tình trạng servo hoạt động bị quá tải. - Kiểm tra tham số P1-56 xem có bị đặt thấp quá không, nếu có đặt giá trị lớn hơn 100 và bỏ tính năng cảnh báo quá tải. |
| AL024 | Lỗi tín hiệu encoder bị nhiễu (Encoder initial magnetic field error) |
- Kiểm tra lại phần cáp nguồn U, V, W có khả năng dây tiếp địa bị mất. - Kiểm tra lại phần cáp encoder có thể đang đi chung cùng dây cáp nguồn hoặc một thiết bị nào đó có từ tính cao gây nhiễu tín hiệu → Tách riêng dây encoder ra khỏi cáp nguồn hoặc các thiết bị gây nhiễu. - Nếu kiểm tra cáp kỹ mà không có vấn đề, khả năng encoder bị hư → Liên hệ với chúng tôi |
| AL025 | Lỗi bên trong encoder (The internal of the encoder is in error) |
- Kiểm tra lại phần cáp kết nối encoder xem có bị đứt, chạm chập, mất dây chống nhiễu hay ảnh hưởng từ các thiết bị có từ tính cao hay không → Kiểm tra lại dây cáp, , hàn lại vỏ chống nhiễu, tách riêng dây encoder ra khỏi cáp nguồn hoặc các thiết bị gây nhiễu. - Nếu kiểm tra cáp kỹ mà không có vấn đề, khả năng encoder bị hư → Liên hệ với chúng tôi |
| AL026 | Lỗi encoder không chính xác (Unreliable internal data of the encoder) |
- Kiểm tra lại phần cáp kết nối encoder xem có bị đứt, chạm chập, mất dây chống nhiễu hay ảnh hưởng từ các thiết bị có từ tính cao hay không → Kiểm tra lại dây cáp, , hàn lại vỏ chống nhiễu, tách riêng dây encoder ra khỏi cáp nguồn hoặc các thiết bị gây nhiễu. - Nếu kiểm tra cáp kỹ mà không có vấn đề, khả năng encoder bị hư → Liên hệ với chúng tôi |
| AL027 | Lỗi bên trong encoder (The internal of the encoder is in error) |
- Kiểm tra lại phần cáp kết nối encoder xem có bị đứt, chạm chập, mất dây chống nhiễu hay ảnh hưởng từ các thiết bị có từ tính cao hay không → Kiểm tra lại dây cáp, , hàn lại vỏ chống nhiễu, tách riêng dây encoder ra khỏi cáp nguồn hoặc các thiết bị gây nhiễu. - Nếu kiểm tra cáp kỹ mà không có vấn đề, khả năng encoder bị hư → Liên hệ với chúng tôi |
| AL028 | Lỗi bên trong encoder (The internal of the encoder is in error) |
- Kiểm tra lại phần cáp kết nối encoder xem có bị đứt, chạm chập, mất dây chống nhiễu hay ảnh hưởng từ các thiết bị có từ tính cao hay không → Kiểm tra lại dây cáp, , hàn lại vỏ chống nhiễu, tách riêng dây encoder ra khỏi cáp nguồn hoặc các thiết bị gây nhiễu. - Nếu kiểm tra cáp kỹ mà không có vấn đề, khả năng encoder bị hư → Liên hệ với chúng tôi |
| AL029 | Lỗi bên trong encoder (The internal of the encoder is in error) |
- Kiểm tra lại phần cáp kết nối encoder xem có bị đứt, chạm chập, mất dây chống nhiễu hay ảnh hưởng từ các thiết bị có từ tính cao hay không → Kiểm tra lại dây cáp, , hàn lại vỏ chống nhiễu, tách riêng dây encoder ra khỏi cáp nguồn hoặc các thiết bị gây nhiễu. - Nếu kiểm tra cáp kỹ mà không có vấn đề, khả năng encoder bị hư → Liên hệ với chúng tôi |
| AL030 | Lỗi động cơ (Motor crash error) |
- Kiểm tra lại tham số P1-57 xem có được bật hay không, có thể đang bị đặt quá nhỏ, nếu nó được đặt chưa đúng vui lòng đặt P1-57 = 0 (Vô hiệu hóa chức năng bảo vệ) sau đó hiệu chỉnh lại dần dần từ 0 lên. - Kiểm tra xem tham số P1-58 (Thời gian độ nhạy cảnh báo) có bị đặt ngắn quá hay không? * Chú ý: Giá trị cài đặt momen xoắn không nên để quá cao hoặc quá thấp, nếu quá thấp chức năng bảo vệ sẽ ngắt không cho hoạt động, nếu đặt quá cao thì chức năng bảo vệ sẽ mất tác dụng. |
| AL031 | Lỗi đấu sai U, V, W (Incorrect wiring of the motor power line U, V, W) |
- Kiểm tra lại kết nối dây U, V, W giữa driver và động cơ có thể đang bị chạm chập, đứt ngầm, lỏng cáp lỏng rắc hoặc mất kết nối một pha nào đó. |
| AL035 | Lỗi encoder bị nóng (Encoder temperature exceeds the protective range) |
- Kiểm tra lại nhiệt độ của encoder và động cơ và đảm bảo rằng nhiệt độ trên encoder không vượt quá 1200 và trên động cơ servo không vượt qua 1050. → Nếu nhiệt độ vượt quá giới hạn cho phép vui lòng tìm cách hạ nhiệt cho động cơ và encoder. |
| AL048 | Lỗi đầu ra encoder (Excessive encoder output error) |
- Kiểm tra lại lịch sử lỗi ở tham số P4-00 ~ P4-05 xem có các lỗi Al011, AL024, AL025, AL026 kh → Nếu có tham khảo cách xử lý các lỗi này ở bên trên. - Kiểm tra lại tham số P1-76 để chắc chắn rằng P1-76 > Tốc độ động cơ (Có thể P1-76 đang bị đặt < Tốc độ động cơ). |
| AL067 | Lỗi cảnh báo nhiệt độ encoder (Encoder temperature warning) |
- Kiểm tra lại nhiệt độ của encoder và động cơ và đảm bảo rằng nhiệt độ trên encoder không vượt quá 1000 và trên động cơ servo không vượt qua 850 . → Nếu nhiệt độ vượt quá giới hạn cho phép vui lòng tìm cách hạ nhiệt cho động cơ và encoder. |
| AL083 | Lỗi quá dòng đầu ra driver (Servo Drive Outputs Excessive Current) |
- Kiểm tra lại dây cáp nguồn U, V, W xem có bị đứt, chạm chập, hay rò vỏ không → Nếu kiểm tra thấy dây nguồn không đảm bảo nên thay dây nguồn mới. - Kiểm tra lại thứ tự U, V, W có thể đang bị đấu lộn các pha không đúng thứ tự. - Kiểm tra lại dây GND xem có bị chạm, chập hay đấu nhầm với dây tín hiệu khác hay không. - Có thể IGBT bị lỗi → Liên hệ với chúng tôi |
| AL085 | Lỗi hãm tái sinh (Regeneration error) |
- Kiểm tra lại phần điện trở xả được lắp thêm bên ngoài có thể bị mất kết nối hoặc do lựa chọn giá trị điện trở chưa phù hợp. - Kiểm tra lại tham số P1-52 và P1-53 xem đã cài đặt phù hợp hay chưa? - Kiểm tra lại tham số P1-53 cần đặt bằng 0 khi không sử dụng điện trở phục hồi. - Nếu kiểm tra hết các thông tin mà driver vẫn lỗi. → Liên hệ với chúng tôi |
| AL099 | Lỗi yêu cầu nâng cấp DSP (DSP firmware upgrade) |
- Đặt tham số P2-08 = 30, sau đó đặt lại P2-08 = 28 có thể lỗi sẽ được xóa. - Kiểm tra và update nâng cấp lại phần mềm. |
| AL555 | Lỗi hệ thống (System failure) |
- Khi lỗi này xảy ra người dùng không nên can thiệp vào thiết bị mà cần liên hệ gửi thiết bị lại cho chúng tôi (Nhà phân phối chính thức thiết bị Delta tại Việt Nam) để được hỗ trợ xử lý. |
| AL880 | Lỗi hệ thống (System failure) |
- Khi lỗi này xảy ra người dùng không nên can thiệp vào thiết bị mà cần liên hệ gửi thiết bị lại cho chúng tôi (Nhà phân phối chính thức thiết bị Delta tại Việt Nam) để được hỗ trợ xử lý. |
→ Như các lỗi phổ biến theo bảng trên chúng ta có thể tổng hợp lại như sau:
- Với trường hợp các lỗi do bị tác động từ các yếu tố bên ngoài như: Kẹt cơ khí, Lỏng cáp, Đứt cáp, Lộn thứ tự U, V, W... đa phần người dùng có thể tự xử lý lỗi khi có sự hướng dẫn từ xa qua điện thoại của chúng tôi.
- Với các trường hợp lỗi do thiết bị như: Hư encoder, hư IGBT, hư main phần cứng ... người dùng cần gửi trực tiếp lên văn phòng công ty chúng tôi để được bộ phận bảo trì kiểm tra và báo giá thay thế, sửa chữa.
- Với các trường hợp lỗi xảy ra khi người dùng lắp đặt servo mới, các lỗi có thể do: Nhầm thứ tự cáp nguồn, lộn dây điều khiển I/O, lộn hoặc lỏng cáp encoder, tải lắp không phù hợp hoặc do các tham số hiệu chỉnh được cài đặt chưa đúng ... → Trường hợp này vui lòng liên hệ trực tiếp với chúng tôi để được hỗ trợ một cách tốt nhất.
4. Những lợi thế mà chúng tôi đang có.
- Độ ngũ kỹ thuật tay nghề cao, có nhiều năm kinh nghiệm thực tế nhiều năm trong nghành tự động hóa đặc biệt là Servo, Biến tần, PLC và HMI.
- Được đầu tư trang thiết bị máy móc phục vụ cho quá trình đo đạc, kiểm tra, phát hiện sự cố và sửa chữa thiết bị điện tử hiện đại.
- Kho linh kiện thay thế luôn có sẵn với đầy đủ các linh kiện phổ biến của tất cả các hãng đảm bảo xử lý sự cố máy móc, thiết bị cho khách hàng một cách nhanh nhất.
- Với trường hợp driver lỗi CPU mất hết chương trình, sau khi sửa chữa xong sẽ được chúng tôi hỗ trợ cài đặt lại đúng như nguyên bản ban đầu khách hàng sẽ không phải lo chuyện làm thế nào để cài đặt lại chạy như cũ.
- Toàn bộ servo sau khi sửa chữa tại công ty chúng tôi đều được Bảo hành 3-6 tháng tùy thuộc vào thời gian sử dụng trước đó của Servo.
- Các thiết bị sau khi sửa chữa đều được test kiểm tra đo đạc có tải, không tải cẩn thận, thiết bị trước khi giao trả khách đều được đội ngũ kỹ sư của chúng tôi tư vấn, phân tích nguyên nhân gây hư hỏng thiết bị cho khách hàng giúp khách hàng hiểu được gốc dễ nguyên nhân gây hư hỏng thiết bị để có các can thiệp cải tiến kịp thời, tránh các sự cố tương tự có thể tiếp tục xảy ra gây gián đoạn sản xuất.
- Nếu các lỗi gặp phải không phải do phần cứng mà chỉ do phần mềm, có thể xử lý bằng cài đặt chúng tôi sẽ hỗ trợ Quý khách hàng khắc phục miễn phí qua điện thoại.
- Chúng tôi có mối quan hệ lâu năm với các đơn vị là đại diện nhà phân phối các hãng tại thị trường Việt Nam. Nếu với những trường hợp bị hư hỏng nặng không thể sửa chữa, thay thế linh kiện chúng tôi sẽ liên hệ với nhà cung cấp chính hãng để thay thế bo mạch mới đúng với model cũ với giá thành cạnh tranh nhất.
- Ngoài dịch vụ về sửa chữa, khi khách hàng có nhu cầu chúng tôi còn cung cấp các dịch vụ: Tư vấn thay thế mới, thiết kế, lắp đặt, cài đặt mới Servo các hãng với giả cả rất cạnh tranh.
5. Tiêu chí hoạt động.
* Dịch vụ sửa chữa Servo của chúng tôi hoạt động trên tiêu chí 3 NHẤT:
⇒ Thời gian sửa chữa nhanh nhất.
⇒ Chi phí sửa chữa thấp nhất.
⇒ Chế độ bảo hành, hỗ trợ sau sửa chữa tốt nhất.
»»» Với những lợi thế như trên chúng tôi tự tin sẽ khắc phục được tất cả các lỗi gặp phải trên tất cả các hãng Servo, với dịch vụ hỗ trợ tốt nhất.
- Với trường hợp các lỗi do bị tác động từ các yếu tố bên ngoài như: Kẹt cơ khí, Lỏng cáp, Đứt cáp, Lộn thứ tự U, V, W... đa phần người dùng có thể tự xử lý lỗi khi có sự hướng dẫn từ xa qua điện thoại của chúng tôi.
- Với các trường hợp lỗi do thiết bị như: Hư encoder, hư IGBT, hư main phần cứng ... người dùng cần gửi trực tiếp lên văn phòng công ty chúng tôi để được bộ phận bảo trì kiểm tra và báo giá thay thế, sửa chữa.
- Với các trường hợp lỗi xảy ra khi người dùng lắp đặt servo mới, các lỗi có thể do: Nhầm thứ tự cáp nguồn, lộn dây điều khiển I/O, lộn hoặc lỏng cáp encoder, tải lắp không phù hợp hoặc do các tham số hiệu chỉnh được cài đặt chưa đúng ... → Trường hợp này vui lòng liên hệ trực tiếp với chúng tôi để được hỗ trợ một cách tốt nhất.
4. Những lợi thế mà chúng tôi đang có.
- Độ ngũ kỹ thuật tay nghề cao, có nhiều năm kinh nghiệm thực tế nhiều năm trong nghành tự động hóa đặc biệt là Servo, Biến tần, PLC và HMI.
- Được đầu tư trang thiết bị máy móc phục vụ cho quá trình đo đạc, kiểm tra, phát hiện sự cố và sửa chữa thiết bị điện tử hiện đại.
- Kho linh kiện thay thế luôn có sẵn với đầy đủ các linh kiện phổ biến của tất cả các hãng đảm bảo xử lý sự cố máy móc, thiết bị cho khách hàng một cách nhanh nhất.
- Với trường hợp driver lỗi CPU mất hết chương trình, sau khi sửa chữa xong sẽ được chúng tôi hỗ trợ cài đặt lại đúng như nguyên bản ban đầu khách hàng sẽ không phải lo chuyện làm thế nào để cài đặt lại chạy như cũ.
- Toàn bộ servo sau khi sửa chữa tại công ty chúng tôi đều được Bảo hành 3-6 tháng tùy thuộc vào thời gian sử dụng trước đó của Servo.
- Các thiết bị sau khi sửa chữa đều được test kiểm tra đo đạc có tải, không tải cẩn thận, thiết bị trước khi giao trả khách đều được đội ngũ kỹ sư của chúng tôi tư vấn, phân tích nguyên nhân gây hư hỏng thiết bị cho khách hàng giúp khách hàng hiểu được gốc dễ nguyên nhân gây hư hỏng thiết bị để có các can thiệp cải tiến kịp thời, tránh các sự cố tương tự có thể tiếp tục xảy ra gây gián đoạn sản xuất.
- Nếu các lỗi gặp phải không phải do phần cứng mà chỉ do phần mềm, có thể xử lý bằng cài đặt chúng tôi sẽ hỗ trợ Quý khách hàng khắc phục miễn phí qua điện thoại.
- Chúng tôi có mối quan hệ lâu năm với các đơn vị là đại diện nhà phân phối các hãng tại thị trường Việt Nam. Nếu với những trường hợp bị hư hỏng nặng không thể sửa chữa, thay thế linh kiện chúng tôi sẽ liên hệ với nhà cung cấp chính hãng để thay thế bo mạch mới đúng với model cũ với giá thành cạnh tranh nhất.
- Ngoài dịch vụ về sửa chữa, khi khách hàng có nhu cầu chúng tôi còn cung cấp các dịch vụ: Tư vấn thay thế mới, thiết kế, lắp đặt, cài đặt mới Servo các hãng với giả cả rất cạnh tranh.
5. Tiêu chí hoạt động.
* Dịch vụ sửa chữa Servo của chúng tôi hoạt động trên tiêu chí 3 NHẤT:
⇒ Thời gian sửa chữa nhanh nhất.
⇒ Chi phí sửa chữa thấp nhất.
⇒ Chế độ bảo hành, hỗ trợ sau sửa chữa tốt nhất.
»»» Với những lợi thế như trên chúng tôi tự tin sẽ khắc phục được tất cả các lỗi gặp phải trên tất cả các hãng Servo, với dịch vụ hỗ trợ tốt nhất.
LIÊN HỆ HOTLINE 0384 577 377
6. Quy trình tiếp nhận sửa chữa Servo:
♦ Bước 1: Tiếp nhận thông tin từ phía khách hàng
- Trao đổi trực trực tiếp thông tin với khách hàng để đánh giá sơ bộ tình trạng.
- Hướng dẫn khách hàng kiểm tra sơ bộ để loại trừ xem có đúng servo bị lỗi không?
♦ Bước 2: Khảo sát thực tế tại nhà máy (Nếu khách hàng yêu cầu)
- Tùy tình trạng từng trường hợp cụ thể nếu khách hàng yêu cầu khảo sát thực tế để đánh giá công ty DKN sẽ bối trí người qua kiểm tra trực tiếp tại nhà máy khách hàng.
♦ Bước 3: Tiếp nhận thiết bị
- Khách hàng chuyển trực tiếp thiết bị đến văn phòng công công ty DKN để được tiến hành kiểm tra thực tế.
- Nếu khách hàng có nhu cầu đến lấy thiết bị trực tiếp tại nhà máy công ty DKN cũng sẵn sàng hỗ trợ một cách nhanh nhất.
♦ Bước 4: Vệ sinh, kiểm tra
- Sau khi thiết bị được tiếp nhận bộ phận kỹ thuật sẽ tiến hành vệ sinh bụi bẩn trên thiết bị.
- Tháo lắp, đo kiểm tra thực tế thiết bị.
♦ Bước 5: Báo giá
- Thiết bị sau khi được kiểm tra cẩn thận sẽ được báo giá chi phí sửa chữa cho khách hàng dựa trên thực tế tình trạng hư hỏng.
♦ Bước 6: Sửa chữa
- Báo giá sau khi được khách hàng đồng ý chấp nhận phía công ty DKN sẽ tiến hành thay thế, sửa chữa các thiết bị hư hỏng.
- Thiết bị sau khi được sửa chữa hoàn thiện sẽ được chạy test thử không tải, có tải tại xưởng công ty DKN.
♦ Bước 7: Bàn giao - Thanh toán
- Thiết bị sau khi được sửa chữa kiểm tra chạy thử đạt tiêu chuẩn sẽ được bàn giao lại cho khách hàng.
- Việc thanh toán sẽ dựa trên thông tin thống nhất về điều khoản thanh toán của 2 bên theo báo giá.
♦ Bước 8: Bảo hành
- Toàn bộ thông tin về tình trạng thiết bị, ngày tiếp nhận và bàn giao sẽ được công ty DKN lưu trữ lại.
- Thời gian bảo hành 3-6 tháng tính từ ngày bàn giao thiết bị. Công ty DKN cam kết thực hiện đúng theo các điều khoản trên báo giá.
- Trao đổi trực trực tiếp thông tin với khách hàng để đánh giá sơ bộ tình trạng.
- Hướng dẫn khách hàng kiểm tra sơ bộ để loại trừ xem có đúng servo bị lỗi không?
♦ Bước 2: Khảo sát thực tế tại nhà máy (Nếu khách hàng yêu cầu)
- Tùy tình trạng từng trường hợp cụ thể nếu khách hàng yêu cầu khảo sát thực tế để đánh giá công ty DKN sẽ bối trí người qua kiểm tra trực tiếp tại nhà máy khách hàng.
♦ Bước 3: Tiếp nhận thiết bị
- Khách hàng chuyển trực tiếp thiết bị đến văn phòng công công ty DKN để được tiến hành kiểm tra thực tế.
- Nếu khách hàng có nhu cầu đến lấy thiết bị trực tiếp tại nhà máy công ty DKN cũng sẵn sàng hỗ trợ một cách nhanh nhất.
♦ Bước 4: Vệ sinh, kiểm tra
- Sau khi thiết bị được tiếp nhận bộ phận kỹ thuật sẽ tiến hành vệ sinh bụi bẩn trên thiết bị.
- Tháo lắp, đo kiểm tra thực tế thiết bị.
♦ Bước 5: Báo giá
- Thiết bị sau khi được kiểm tra cẩn thận sẽ được báo giá chi phí sửa chữa cho khách hàng dựa trên thực tế tình trạng hư hỏng.
♦ Bước 6: Sửa chữa
- Báo giá sau khi được khách hàng đồng ý chấp nhận phía công ty DKN sẽ tiến hành thay thế, sửa chữa các thiết bị hư hỏng.
- Thiết bị sau khi được sửa chữa hoàn thiện sẽ được chạy test thử không tải, có tải tại xưởng công ty DKN.
♦ Bước 7: Bàn giao - Thanh toán
- Thiết bị sau khi được sửa chữa kiểm tra chạy thử đạt tiêu chuẩn sẽ được bàn giao lại cho khách hàng.
- Việc thanh toán sẽ dựa trên thông tin thống nhất về điều khoản thanh toán của 2 bên theo báo giá.
♦ Bước 8: Bảo hành
- Toàn bộ thông tin về tình trạng thiết bị, ngày tiếp nhận và bàn giao sẽ được công ty DKN lưu trữ lại.
- Thời gian bảo hành 3-6 tháng tính từ ngày bàn giao thiết bị. Công ty DKN cam kết thực hiện đúng theo các điều khoản trên báo giá.
Thông tin liên hệ để được hỗ trợ tư vấn
Kỹ sư: NGUYỄN VĂN MINH - HP: 0384 577 377 (Zalo)